
How do you decide where to send autonomous platforms when ocean conditions are constantly changing? In GEORGE, one of the tools explored for this purpose is FleetBot, an adaptive sampling tool designed to support oceanographic planning.
FleetBot is a guidance tool, developed by GEORGE partner MyOcean Resources Ltd., that sits between ocean models and real-world observations. It uses a model as a kind of virtual ocean to test different sampling options and identify the best starting plan for observations.
In simple terms, FleetBot helps scientists decide where to sample, and how to deploy the assets they already have, more efficiently.
“It’s really a tool to help the design of research missions in an optimal and objective way,” says John Allen, Founder and Director of MyOcean Resources.
In GEORGE, the tool was first used in planning the project’s major demonstration campaign to the Porcupine Abyssal Plain Sustained Observatory (PAP) site in the Northeast Atlantic, where multiple autonomous platforms were deployed in June 2025 at different ocean depths. In summer 2026, it will be used again for the GEORGE field trials in the Northwestern Mediterranean Sea. Both demonstrations link to GEORGE’s broader efforts to improve how research infrastructures coordinate adaptive sampling and data flows across observing networks.
How the tool works
FleetBot uses ocean model outputs from Copernicus to create maps and suggested sampling patterns. It uses ocean models as a virtual environment in which different sampling options can be tested against the scientific goal, the time available, and the assets in the water.
“What are your assets? How much time have you got? Let’s see how we can do the best job in the minimal time or minimal cost with the assets you have, to sample this virtual world. This is what we call this optimal sampling” Allen describes.

For the PAP demonstration, FleetBot was used especially in the early phase through daily meetings and more frequent emails when required. John Allen would re-run FleetBot and send updated guidance, including model images and suggested navigation patterns for the vehicles. During the cruise, he continued sending email updates with model conditions and recommended patterns in near real time; adaptive sampling.
The tool used four months of Copernicus 1/36 ° forecast data from 1 April to 02 August 2023, focused on a roughly 2° by 2° box around PAP, and simulated a mixed fleet of three floats, two glider-style vehicles and a surface Sailbuoy-style vehicles.
The teams running the demonstration at the PAP site in the Northeast Atlantic took these recommendations into account while also considering scientific, environmental and practical questions, as well as their experience working in these conditions.
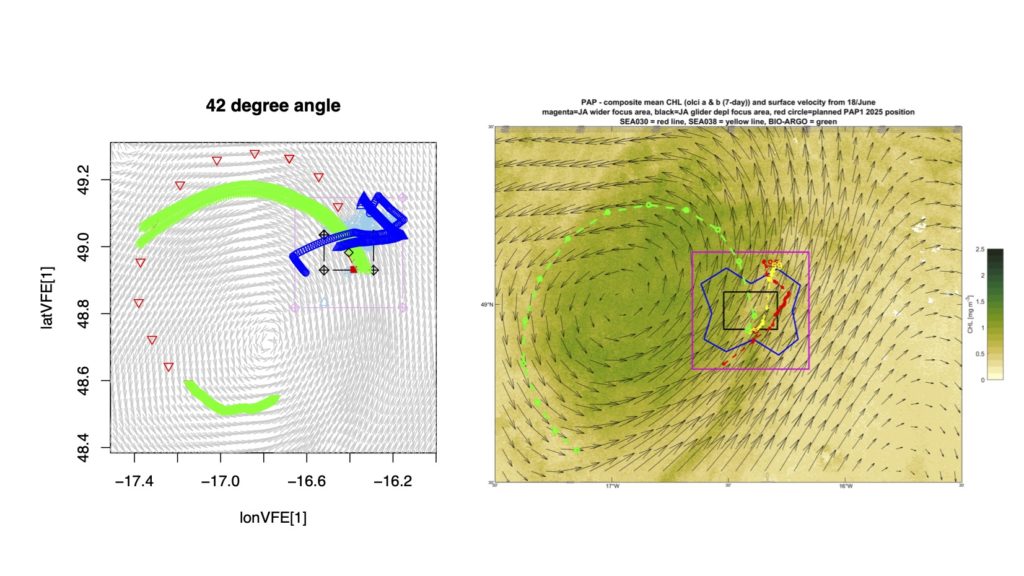
Strong sea currents affected glider movement
What the tool could not fully account for were the exceptionally strong sea currents that affected especially the glider movement. An intense cyclonic eddy produced currents that were stronger than the model predicted, so the gliders could not carry out the preferred sampling patterns. In response, the sampling objective was then changed to a more pragmatic one of maximising the common observing between all the observing platforms, for maximum inter-calibration purposes. This approach was less sensitive to the ocean currents.

“It’s important that this is considered as a cruise planning and cruise monitoring guidance tool ,” Allen says. He adds that even though FleetBot can produce instructions for autonomous vehicles, “I would always advise close examination of the suggestions in the context of other, often complex cruise objectives and restrictions, prior to direct instruction of observing vehicles.”
Supporting autonomous measurements
GEORGE is developing sensor and sampler technologies for autonomous platforms. These platforms still need instructions about where to go, whether those are given by a person or informed by a model-based simulation tool.
Decisions about where to send a platform, its navigation, are determined by the scientific question being explored, sea currents and other environmental conditions, the time available, the total fleet of platforms and sensors available, and practical constraints such as safety, recovery and how closely the vehicles need to work with the ship or with one another.
As models and guidance tools like FleetBot continue to develop, the relationship between them and the platforms becomes a central question, especially when it comes to the level of autonomy. Although guidance tools like FleetBot can reveal efficient alternatives, human over-sight is still needed, because not even the best models can predict everything about the real ocean conditions.
“No matter how good the tools are getting, the models are not the real world”, John Allen says, “but we strive to provide objective planning support so that the operator is better informed.”
Read more:
Allen, J. T. (2017). Marine algae are ‘taught’ the basics of angular momentum. Ocean Dynamics, 67(11), 1429-1442. https://doi.org/10.1007/s10236-017-1094-8
Rixen, M., Allen, J. T., Pollard, R. T., & Beckers, J. M. (2003). Along or across front ocean survey strategy? The estimation of quasi‐geostrophic vertical velocities and temperature fluxes. Geophysical research letters, 30(5). https://doi.org/10.1029/2002GL015810
[SL(1]Maybe add the link to copernicus data portal?